- 资讯详情
- 首页
-
- 资讯
-
- 行业资讯
-
- 煤矿巷道三维激光扫描关键技术研究
煤矿巷道三维激光扫描关键技术研究
近年来,随着工业互联网、大数据、云计算、人工智能、5G等技术的飞速发展及在各行各业的广泛应用,传统的煤炭行业迎来了智能化、无人化发展的巨大机遇并取得了一系列成果。但是,煤矿智能化开采距离真正的智能化、无人化还有很长的路要走,智慧煤矿与智能化开采是一个复杂的巨系统,精准地质信息探测是当前智慧煤矿建设中的重点研发方向之一。
巷道承载了矿井运输、通风、排水、供电、逃生路径等功能,巷道三维模型的快速获取成为地质透明化的重要一环,是煤矿智能化高效绿色开采的重要组成部分。
传统巷道建模主要有3种
1、基于巷道顶底板中心线和断面建模;
2、基于巷道中心线和顶底板边界线建模;
3、基于巷道中心线或者边界线和高程建模。
一般步骤:
采集巷道测量数据(实测数据、断面数据)、数据去重、规格化、模型构建、表面三角化、实体渲染。其中最重要的是采集巷道测量数据:
一种方法是利用井下巷道的导线点并结合巷道的地质写实图获取数据并建模;另一种方法是组织人力进行巷道尺寸、煤层起伏情况等数据测量。
第一种方法的缺点是随着矿井采掘活动的进行,巷道会产生一定的形变,导致地质写实、图纸更新和建模需要定期重复;第二种方法的缺点是井下地质写实和测量费时费力,效率低下。
三维激光扫描技术
三维激光扫描技术可以快速获取被测物体的表面三维坐标,扫描得到的点云数据精度高、密度大、包含反射强度等丰富的语义信息。借助点云数据可以构建复杂巷道模型。一般通过三维激光扫描系统进行数据采集,该系统集成了全球卫星导航系统、惯性测量单元、一颗或多颗激光雷达、全景相机、里程计等传感器,安装在飞机、车辆、移动小车等不同的载体上,可实现不同场景三维点云数据的快速获取。受到卫星定位信号及精度的影响,在信号较差的环境下(如地下停车场、隧道、煤矿井下等)点云数据的采集及拼接是业界的难题。
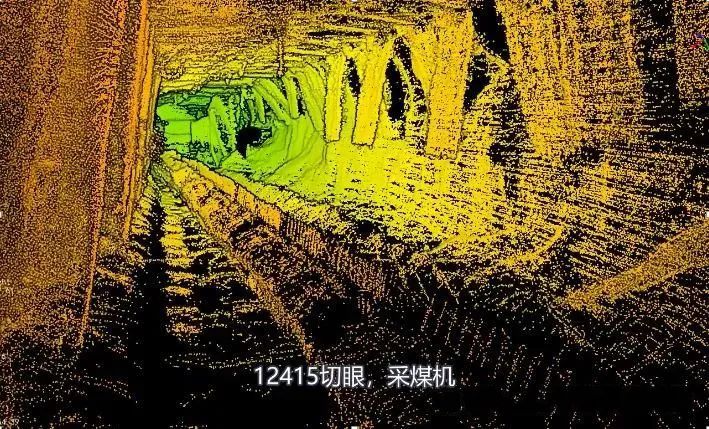
对比分析传统巷道建模方法及其优缺点,中煤科工西安研究院(集团)有限公司透明矿井技术研究所利用三维激光扫描重建技术对构建高精度透明工作面巷道模型提出了新的思路。在分析煤矿井下工况环境长距离三维激光扫描面临的技术难题的基础上,研究了三维激光扫描原理和空间点坐标计算方法,并提出了透明工作面巷道三维激光扫描重建技术流程,通过三维激光扫描系统动态标定和坐标转换方法;点云预处理技术中基于统计滤波法的大尺度噪声滤波方法和基于移动最小二乘的小尺度噪声滤波算法;点云关键点提取与特征描述技术中SIFT特征检测算法和FPFH特征描述算法;点云配准技术中基于FPFH特征描述算法的粗配准技术和基于迭代最近点算法的精配准技术等方法提高了巷道建模精度和速度。同时利用自主研发的移动式三维激光扫描系统从三维激光扫描施工流程、巷道点云数据采集、边界轮廓线提取、巷道与工作面联合建模等方面进行实践应用。结果表明,基于三维激光扫描技术的工作面巷道三维重建思路能为复杂巷道的快速三维扫描、重建提供一条可行的技术路径。
来源:绿色矿山网
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本网联系,我们将及时更正、删除,谢谢。 联系方式:services@kjzj.com



-
国务院安委办:严查山西煤矿,排查整治各类事故隐患
2021-08-12 查看详情 -

煤矿瓦斯防治“八招”及释义
2021-09-16 查看详情 -

百度飞桨助力华夏天信赋予机器人智能 让煤矿生产更安全
2021-09-25 查看详情
 求购
求购